I robot rappresentano da secoli un settore che ha catalizzato attenzione e studi mentre ricercatori e inventori hanno cercato di scoprire il potenziale della tecnologia dell’automazione. Mentre i macchinari autonomi sono oggetto di sviluppo e creazione da molto tempo, i robot quadrupedi mobili (ovvero cani robot a quattro zampe) hanno assistito a un notevole boom negli ultimi decenni.
La progettazione dei robot quadrupedi nasce dall’esigenza di avere robot capaci di spostarsi ed esplorare terreni accidentati o pericolosi. Rispetto agli altri robot mobili (come i robot su ruote o bipedi), i robot quadrupedi vantano un sistema locomotorio superiore in termini di stabilità, controllo e velocità.
Le capacità dei robot quadrupedi sono studiate in un’ampia gamma di settori, dalle costruzioni e l’intrattenimento all’esplorazione spaziale e l’impiego militare. Oggi, imprese e sviluppatori possono acquistare moderni robo-cani e assegnare loro mansioni da svolgere o dedicarli all’esplorazione di ambienti ritenuti troppo rischiosi per gli esseri umani. Prosegui la lettura per scoprire l’evoluzione dei cani robot e quali sono le prospettive future, in alternativa consulta direttamente la nostra infografica animata.
1966: Phony Pony

Phony Pony era in grado di strisciare, camminare e andare al trotto, il tutto però a una velocità molto bassa. Grazie alla struttura “pelvica” con bloccaggio a molla, era in grado di preservare la sua stabilità statica verticale durante il movimento. Poiché Phony Pony è stato progettato prima dell’avvento dei microprocessori, poteva essere comandato solo usando dei cavi collegati a un computer a distanza collocato in un edificio poco distante.
Sviluppatori: Frank e McGhee
Impiego: prima fase di ricerca e sviluppo di quadrupedi autonomi
1999: AIBO
Grazie all’implementazione dei sensi di tatto, udito, vista e capacità di equilibrio, poteva rispondere a comandi vocali, strette di mano, riusciva a camminare e inseguire una palla. Era anche in grado di esprimere ben sei “emozioni”: felicità, tristezza, paura, rabbia, repulsione e sorpresa. Faceva capire il suo stato emotivo scodinzolando, cambiando il colore degli occhi e muovendo parti del corpo, oltre che con una serie di suoni tra cui l’abbaiare, il guaire e il ringhiare. Oggi, AIBO è usato da numerosi gruppi di ricerca per testare l’intelligenza artificiale e le tecnologie di integrazione dei sensori.
Sviluppatore: Sony
Impiego: giocattoli e intrattenimento
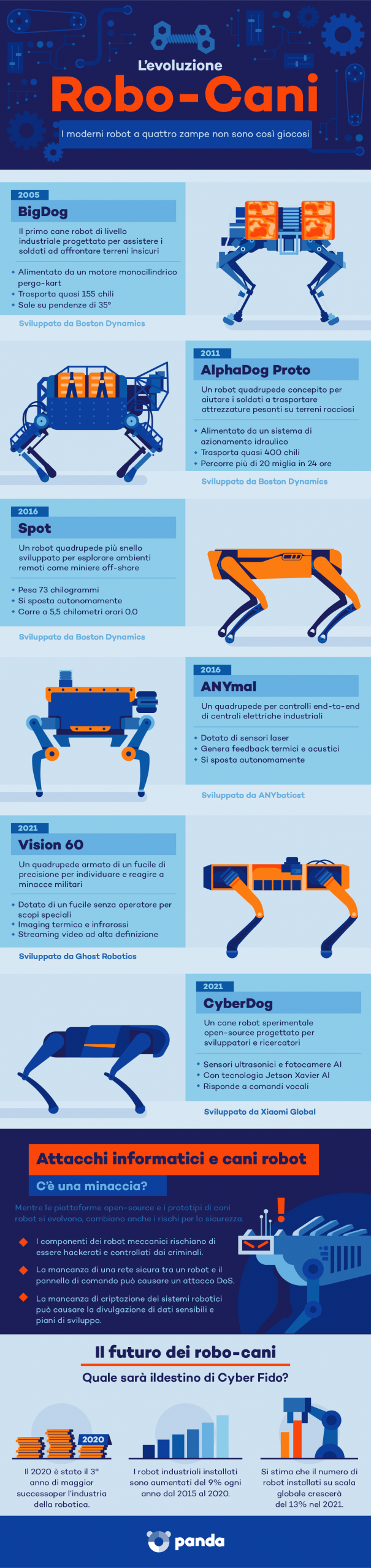
2005: BigDog
Ogni gamba di BigDog ha un sistema di compliance lineare pneumatico passivo, ovvero in grado di controllare le forze di contatto tra il robot e un ambiente solido, oltre a tre articolazioni attive a livello di ginocchia e anche. Il robot è alimentato da un motore monocilindrico per go-kart e riesce a preservare l’equilibrio grazie al suo sistema dinamico di regolazione. I suoi sensori di movimento rilevano posizione e forza delle articolazioni, contatto con il suolo, carico al suolo e comprendono un sistema di visione stereoscopico.
Nel 2012, gli sviluppatori stavano ancora lavorando per migliorare le capacità di BigDog prima che si prospettassero i piani di impiegarlo ufficialmente per operazioni militari. Tuttavia, il progetto è stato terminato nel 2015 dopo aver decretato che il suo motore a benzina era troppo rumoroso per essere utilizzato sul campo di battaglia.
Sviluppatore: Boston Dynamics
Impiego: supporto ai soldati su terreni non sicuri
2009: LittleDog

Ciascuna delle gambe di LittleDog è dotata di tre motori elettrici alimentati da batterie ai polimeri di litio con un’autonomia massima di trenta minuti. LittleDog preserva un’ampia gamma di movimenti ed è in grado di arrampicarsi, strisciare e camminare su terreni rocciosi. Un computer di livello PC posizionato su LittleDog è responsabile della gestione dei sensori di movimentazione, dei comandi e delle comunicazioni. Può essere controllato a distanza e include il supporto di data logging per finalità di analisi.
Sviluppatore: Boston Dynamics
Impiego: ricerca sulla locomozione nei quadrupedi
2011: AlphaDog Proto

AlphaDog Proto è equipaggiato con un sistema di navigazione GPS e di visione artificiale che gli consente di seguire i soldati durante il trasporto dell’attrezzatura. Grazie a un motore a combustione interno, AlphaDog Proto ha dimostrato di essere più silenzioso rispetto al precedente BigDog e questo ne ha aumentato l’adeguatezza per le missioni sul campo.
Sviluppatore: Boston Dynamics
Impiego: supporto ai soldati nel trasporto di attrezzature pesanti su terreni non sicuri
2012: Legged Squad Support System (LS3)

Rispetto a BigDog, LS3 era circa 10 volte più silenzioso in determinati momenti e vantava una maggiore velocità di camminata compresa tra circa 1,6 e 4,8 chilometri orari, una superiore velocità di corsa pari a otto chilometri orari e la capacità di correre su superfici lisce a più di undici chilometri orari. Era inoltre in grado di rispondere a dieci comandi vocali, una funzionalità più efficace per i soldati che sarebbero stati troppo preoccupati per la missione per ricorrere a comandi manuali.
A cinque anni dallo sviluppo, LS3 era stato migliorato sufficientemente da poter operare con i Marine nell’ambito di esercitazioni realistiche di combattimento ed è stato impiegato per portare rifornimento alle truppe sul campo in località difficili da raggiungere per i veicoli militari. Nel 2015, tuttavia, LS3 è stato accantonato a causa di limitazioni acustiche e nelle riparazioni. Nonostante il corpo dei Marine non riuscisse in definitiva a utilizzare l’LS3 in servizio, ha fornito preziose informazioni di ricerca nel comparto delle tecnologie di automazione.
Sviluppatore: Boston Dynamics
Impiego: supporto ai soldati nel trasporto di attrezzature pesanti su terreni non sicuri
2016: Spot

L’hardware di Spot comprende potenti schede di controllo e cinque unità sensore posizionate su tutti i lati che gli consentono di esplorare un’area autonomamente da qualsiasi angolazione. Dodici motori personalizzati alimentano le zampe di Spot e gli permettono di raggiungere la velocità di oltre cinque chilometri orari con un’autonomia massima di 90 minuti. I suoi sensori sono in grado di rilevare immagini sferiche e gli danno la capacità di compiere gesti prensili, come aprire una porta o afferrare un oggetto. Le tecnologie di comando di Spot sono sensibilmente più avanzate rispetto ai precedenti robot di Boston Dynamics, dandogli la possibilità di controllo autonomo in un ampio ventaglio di scenari.
Sviluppatore: Boston Dynamics
Impiego: documentazione delle procedure di costruzione e monitoraggio a distanza di ambienti ad alto rischio
2016: ANYmal
ANYmal integra una vasta gamma di sensori di controllo laser per fornire feedback visivi, termici e acustici. Dotato di una fotocamera integrata, è in grado di regolare le impostazioni di movimento sugli assi orizzontale e verticale così da configurare la visuale dell’area di ispezione. ANYmal è in grado di percepire autonomamente l’ambiente, programmare il percorso di esplorazione e selezionare punti di appoggio adeguati durante lo spostamento. Può persino salire le scale e accedere ad aree in cui i tradizionali robot su ruote non riuscirebbero a entrare.
ANYmal è stato oggetto di numerosi sviluppi dal 2016 e dal 2021 è disponibile per l’ordinazione. ANYbotics sta lavorando a una versione aggiornata del robot dedicata agli ambienti potenzialmente esplosivi.
Sviluppatore: ETH Zurich e ANYbotics
Impiego: ispezione da remoto di ambienti non sicuri
2021: Vision 60
Vision 60 può trasportare massimo 14 chilogrammi e può spostarsi a una velocità di 5,75 chilometri orari. È considerato un robot semiautonomo a causa del fucile integrato; sebbene sia in grado di mirare a un obiettivo autonomamente e con precisione, non può sparare senza l’intervento di un operatore umano (in osservanza della politica sui sistemi autonomi dell’esercito degli Stati Uniti che vieta le interazioni automatiche nei combattimenti).
Sviluppatore: Ghost Robotics
Impiego: operazioni militari e di sicurezza interna
2021: CyberDog

CyberDog è dotato di svariate fotocamere e sensori di immagine posizionati sulla struttura, tra cui sensori touch e un obiettivo fisheye ultra-grandangolare. CyberDog può archiviare 128 gigabyte di dati ed è alimentato dalla piattaforma Jetson Xavier AI di Nvidia per effettuare analisi in tempo reale dei dintorni, creare percorsi, programmare l’arrivo ed evitare ostacoli. CyberDog può inoltre fare una capriola all’indietro e rispondere ai comandi vocali grazie ai suoi sei microfoni.
Rendendo CyberDog un progetto open-source, Xiaomi spera di ampliare il suo raggio d’azione nel futuro dello sviluppo e dell’innovazione robotica. La piattaforma open-source vuole spingere gli appassionati di robotica a scrivere di propria mano il codice per CyberDog, offrendo al progetto una maggiore esposizione e consolidando l’immagine di Xiaomi nella community della robotica.
Sviluppatore: Xiaomi Global
Impiego: piattaforma open-source che gli sviluppatori possono migliorare
Mentre il mercato dei robot a quattro zampe si trova ancora nelle prime fasi, l’interesse per questo settore si sta destando costantemente in una vasta gamma di industrie. Per quanto riguarda i timori che i robot possano eliminare l’esigenza dei lavori tradizionalmente svolti dall’uomo, queste macchine sono state concepite più per essere d’aiuto agli esseri umani e al loro lavoro, che per poterli rimpiazzare completamente.
Dall’altra parte, non bisogna ignorare le preoccupazioni in materia di privacy correlate ai robot. Come per qualsiasi dispositivo tecnologico, l’hackeraggio è sempre possibile, in particolare per quei modelli di robot open-source che possono generare rischi per i dati personali degli utenti. Questo non riguarda soltanto i quadrupedi descritti in precedenza, bensì i più comuni sistemi robotici di stampo commerciale come ad esempio i baby monitor, gli impianti di sicurezza e altri dispositivi connessi a reti Wi-Fi. È fondamentale garantire che la rete domestica sia il più possibile efficiente e sicura, dotandola di una piattaforma domestica antivirus.
L’evoluzione dei robo-cani